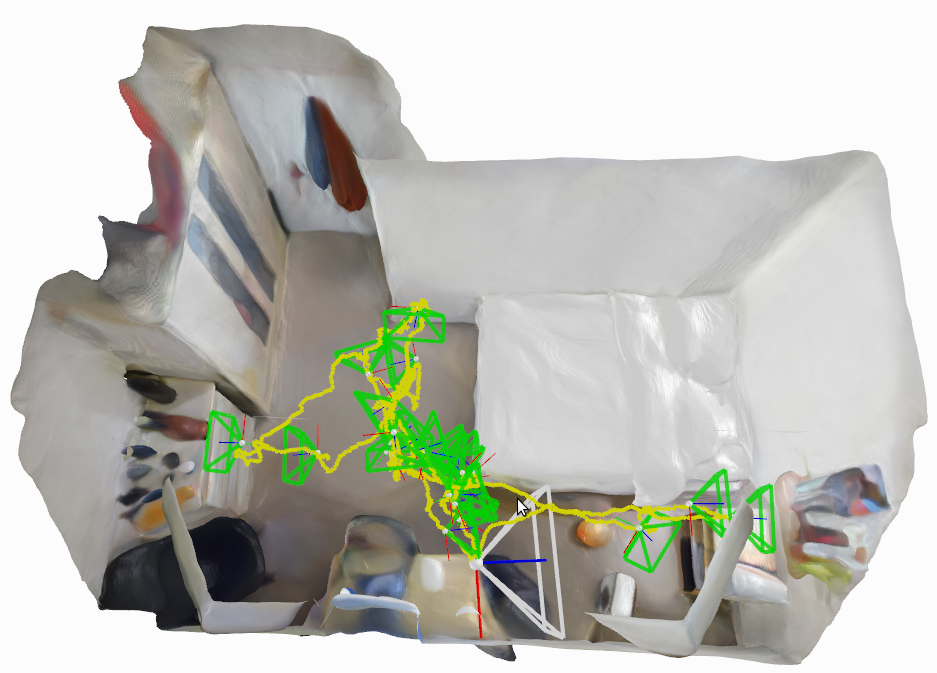
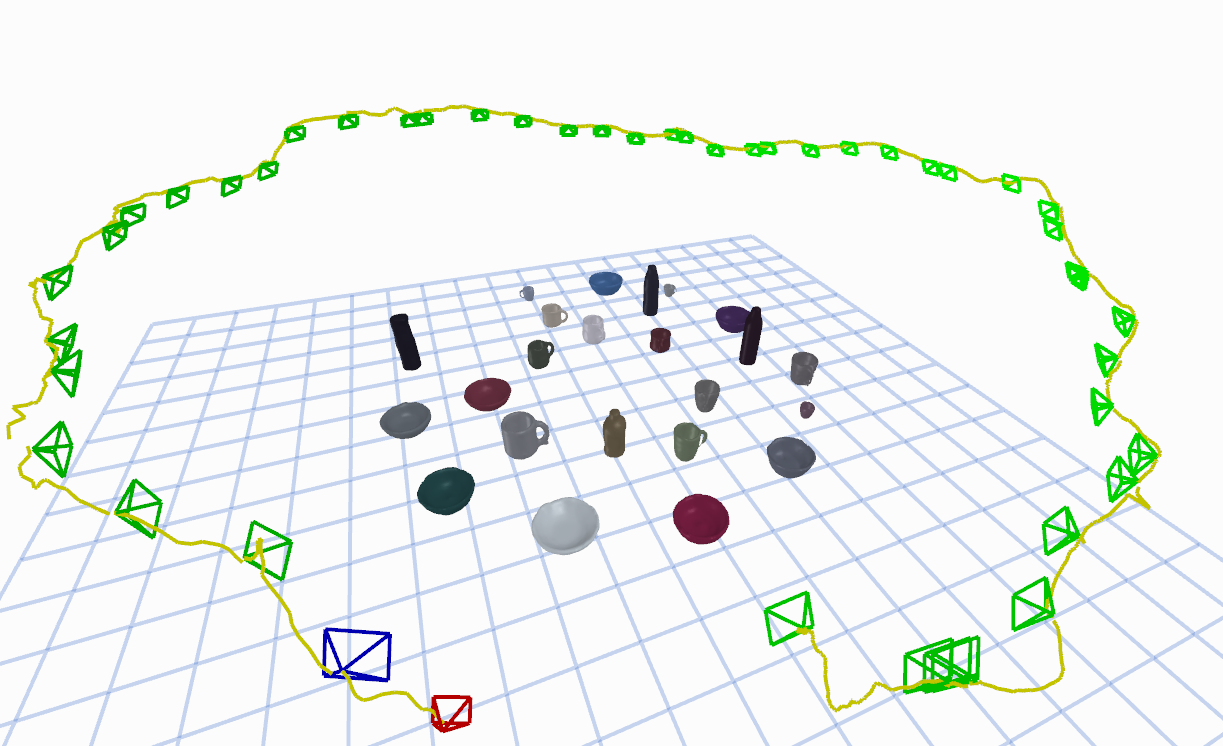
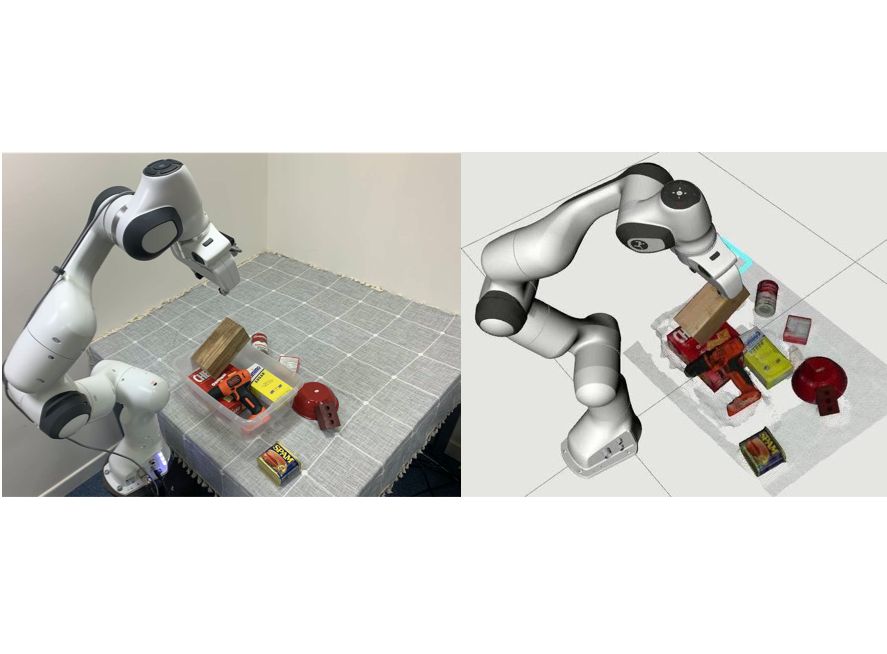
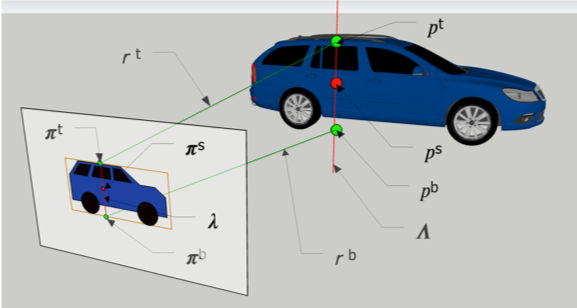
2022 Feature-Realistic Neural Fusion for Real-Time, Open Set Scene Understanding Mazur, Kirill, Sucar, Edgar, and Davison, Andrew J arxiv 2022 Project Webpage PDF Real-time Mapping of Physical Scene Properties with an Autonomous Robot Experimenter Haughton, Iain, Sucar, Edgar, Mouton, Andre, Johns, Edward, and Davison, Andrew J CoRL (oral) 2022 Project Webpage PDF iSDF: Real-Time Neural Signed Distance Fields for Robot Perception Ortiz, Joseph, Clegg, Alexander, Dong, Jing, Sucar, Edgar, Novotny, David, Zollhoefer, Michael, and Mukadam, Mustafa RSS 2022 Project Webpage PDF Video Incremental Abstraction in Distributed Probabilistic SLAM Graphs Ortiz, Joseph, Evans, Talfan, Sucar, Edgar, and Davison, Andrew J ICRA 2022 Project Webpage PDF Video 2021 iLabel: Interactive Neural Scene Labelling Zhi, Shuaifeng*, Sucar, Edgar*, Mouton, Andre, Haughton, Iain, Laidlow, Tristan, and Davison, Andrew J arXiv 2021 Project Webpage PDF Video iMAP: Implicit Mapping and Positioning in Real-Time Sucar, Edgar, Liu, Shikun, Ortiz, Joseph, and Davison, Andrew J ICCV 2021 Project Webpage PDF Video 2020 NodeSLAM: Neural object descriptors for multi-view shape reconstruction Sucar, Edgar, Wada, Kentaro, and Davison, Andrew 3DV 2020 Project Webpage PDF Video Morefusion: Multi-object reasoning for 6d pose estimation from volumetric fusion Wada, Kentaro, Sucar, Edgar, James, Stephen, Lenton, Daniel, and Davison, Andrew J CVPR 2020 Project Webpage PDF Video Code 2018 Bayesian scale estimation for monocular SLAM based on generic object detection for correcting scale drift Sucar, Edgar, and Hayet, Jean-Bernard ICRA 2018 Project Webpage PDF