|
Edgar Sucar I am Postdocotral Fellow in the VGG at the Univiersity of Oxford working with Prof. Andrea Vedaldi. Previously, I completed a PhD in the Dyson Robotics Lab at Imperial College London under the supervision of Prof. Andrew Davison. I am generally interested in developing methods for 3D/4D scene understanding that enable robots to have meaningful interactions with their environment. I enjoy building practical real-time systems. |

|
ResearchResearch Interests: Computer Vision, SLAM, 4D Reconstruction, Robotics. |
|
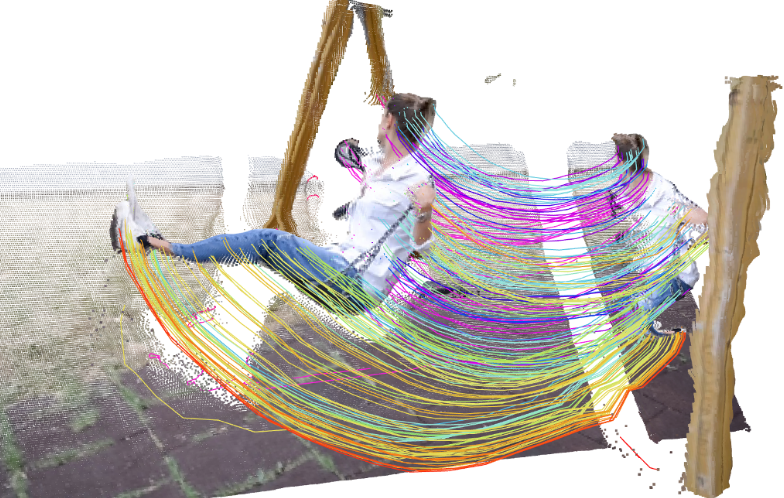
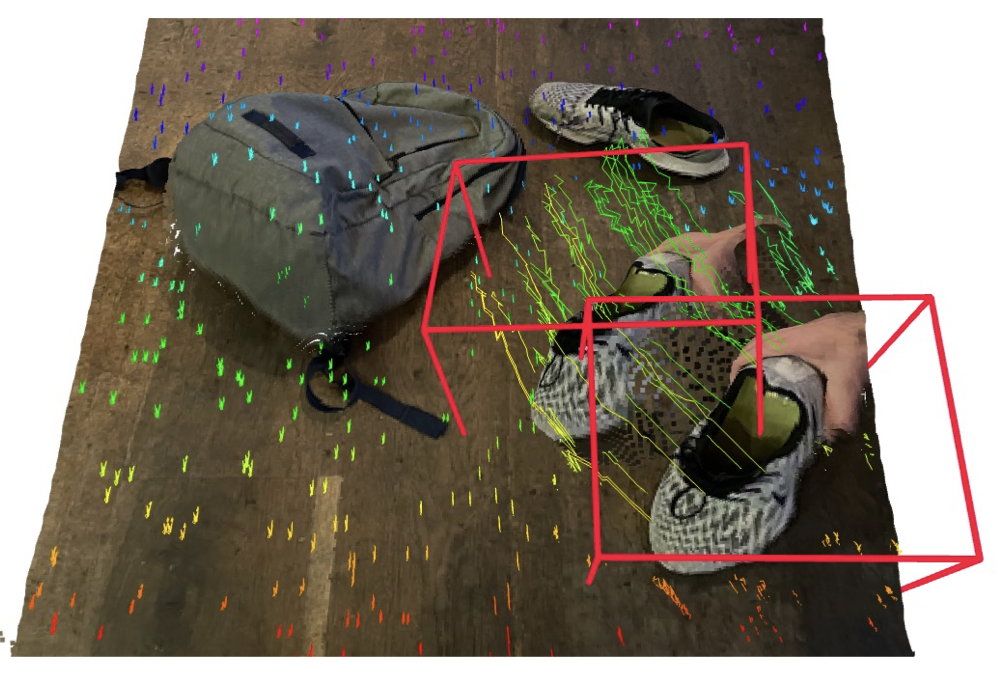
V-DPM: Video Reconstruction with Dynamic Point Maps
Edgar Sucar*, Eldar Insafutdinov*, Zihang Lai, Andrea Vedaldi coming soon.. project page / paper
|
|
Dynamic Point Maps: A Versatile Representation for Dynamic 3D Reconstruction
Edgar Sucar, Zihang Lai, Eldar Insafutdinov, Andrea Vedaldi ICCV, 2025 (Highlight) project page / paper
|
|
Feature-Realistic Neural Fusion for Real-Time, Open Set Scene Understanding
Kirill Mazur, Edgar Sucar, Andrew J. Davison ICRA, 2023 project page / paper
|
|
iMODE: Real-Time Incremental Monocular Dense Mapping Using Neural Field
Hidenobu Matsuki, Edgar Sucar, Tristan Laidlow, Kentaro Wada, Raluca Scona, Andrew J. Davison ICRA, 2023 (Oral Presentation, Best Navigation Paper Award Finalist) paper
|
|
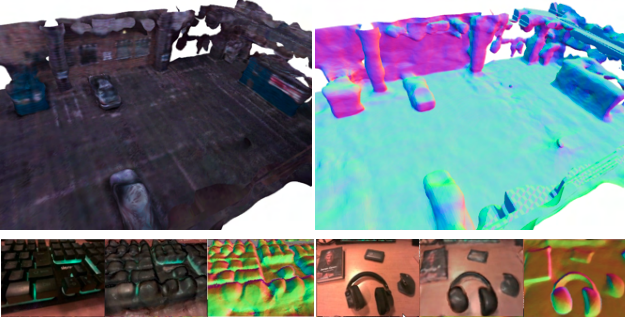
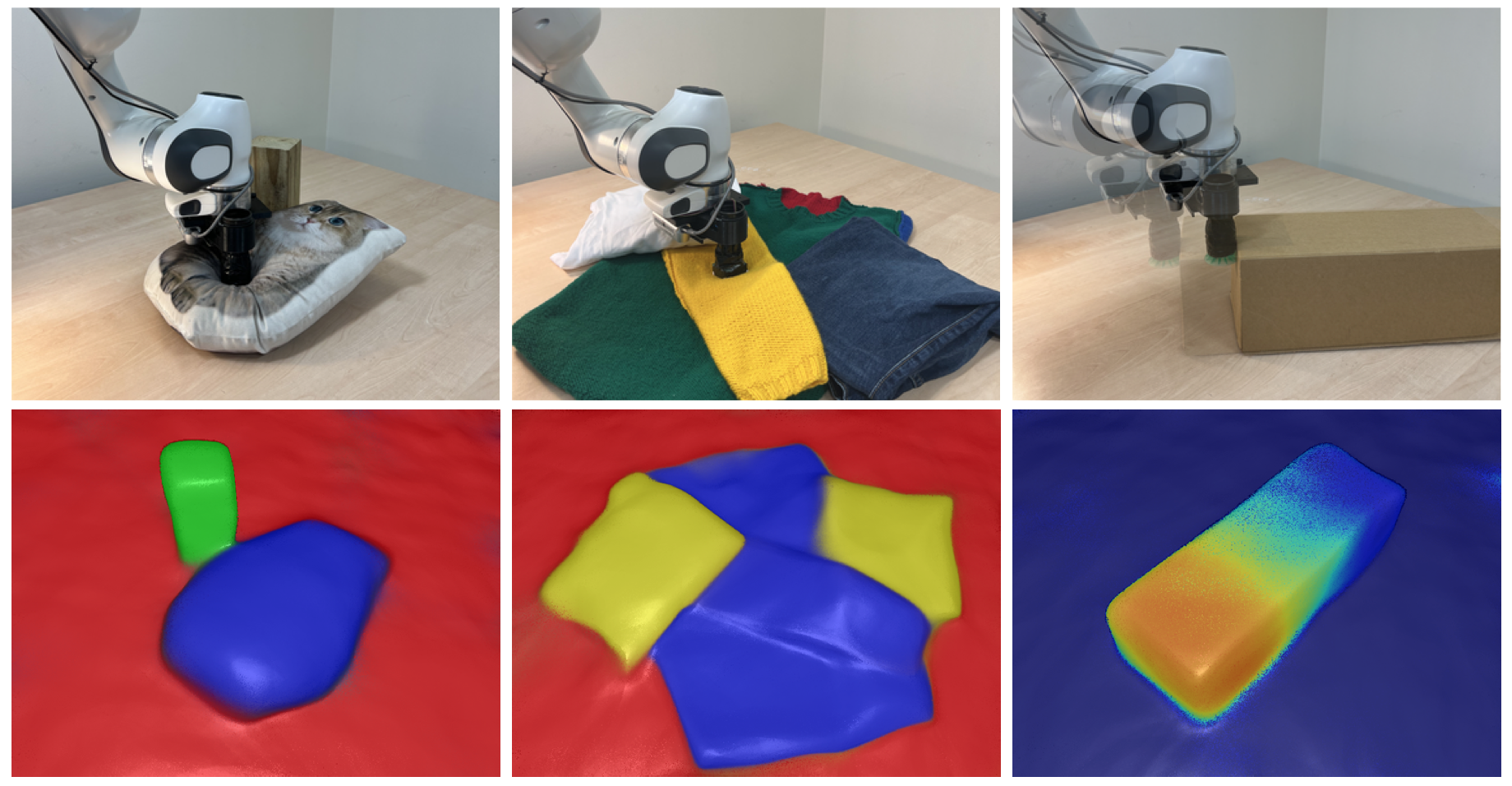
Real-time Mapping of Physical Scene Properties with an Autonomous Robot Experimenter
Iain Haughton, Edgar Sucar, Andre Mouton, Edward Johns, Andrew J. Davison CoRL, 2022 (Oral Presentation) project page / paper
|
|
iSDF: Real-Time Neural Signed Distance Fields for Robot Perception
Joseph Ortiz, Alexander Clegg, Jing Dong, Edgar Sucar, David Novotny, Michael Zollhoefer, Mustafa Mukadam RSS, 2022 project page / paper
|
|
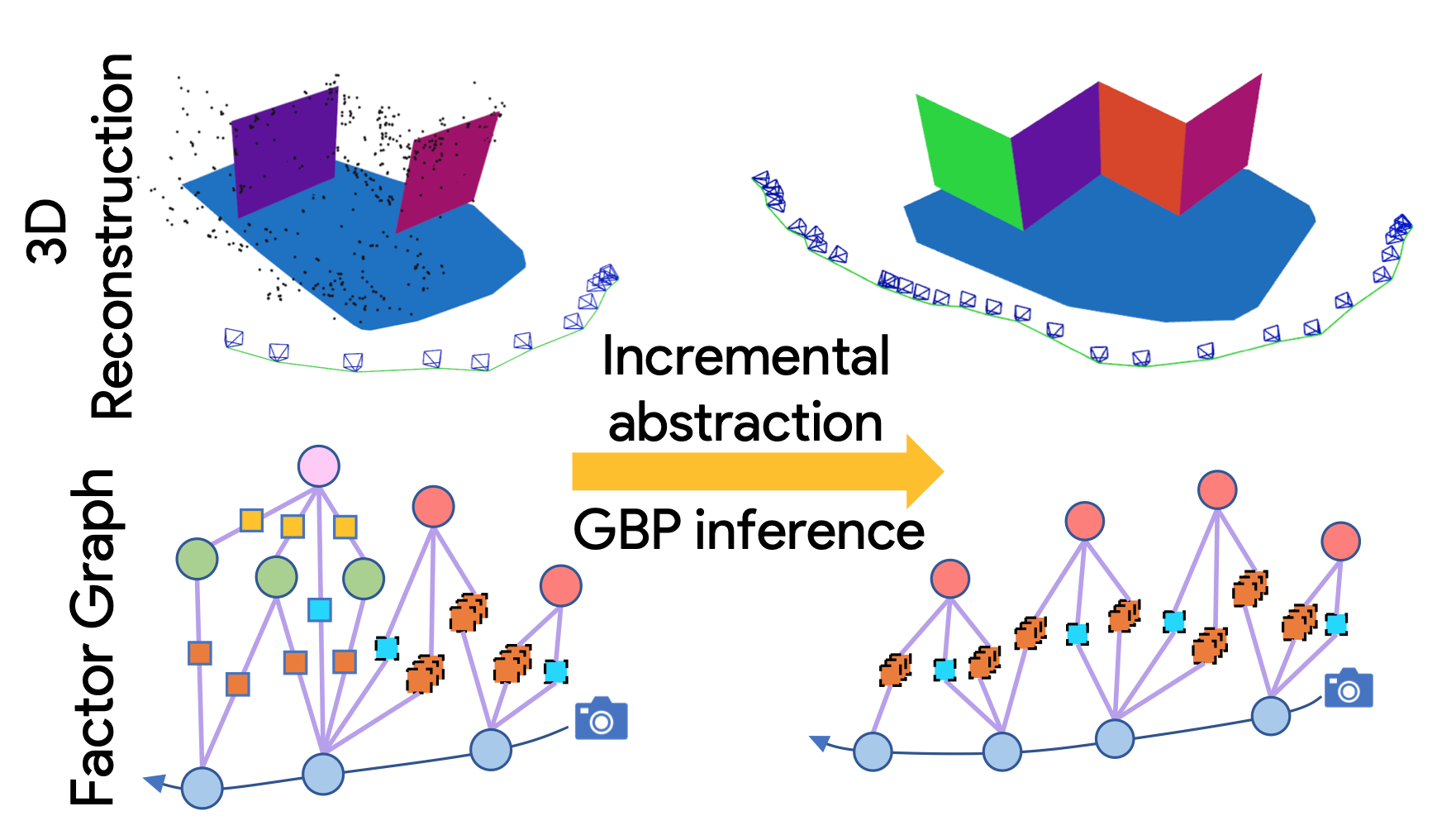
Incremental Abstraction in Distributed Probabilistic SLAM Graphs
Joseph Ortiz, Talfan Evans, Edgar Sucar, Andrew J. Davison ICRA, 2022 project page / paper
|

|
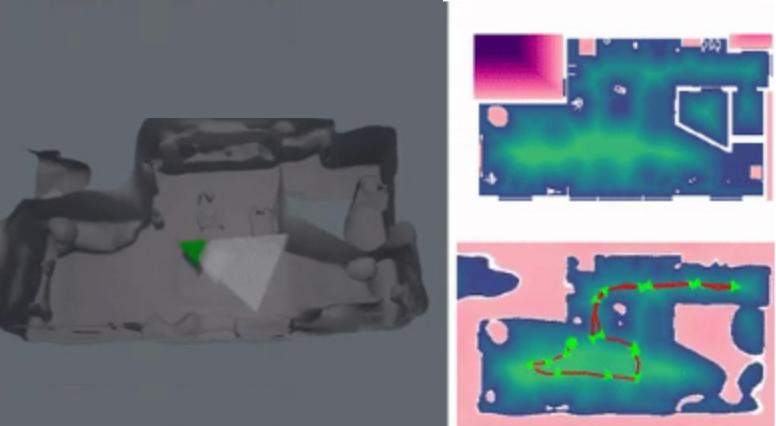
iLabel: Interactive Neural Scene Labelling
Shuaifeng Zhi*, Edgar Sucar*, Andre Mouton, Iain Haughton, Tristan Laidlow, Andrew J. Davison RA-L, 2022 project page / paper
|
|
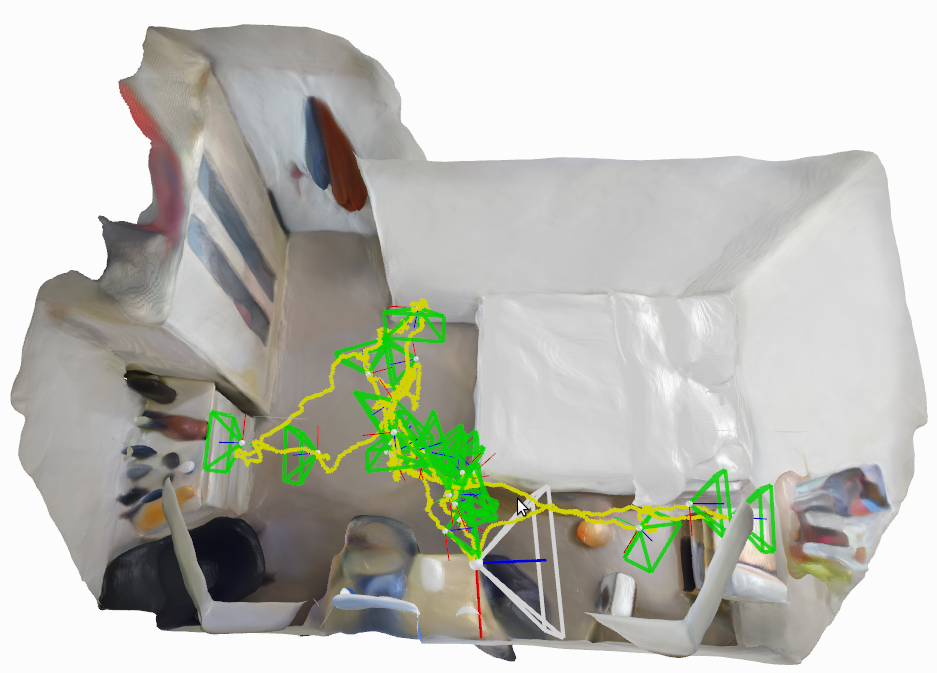
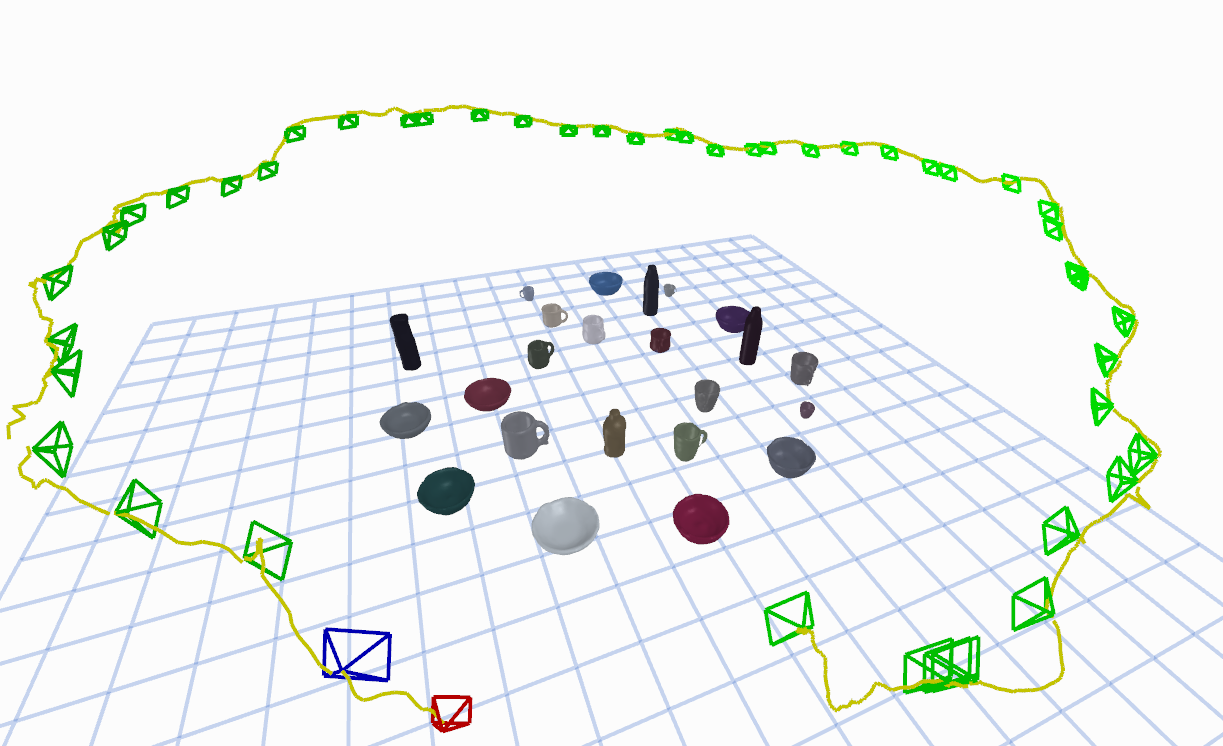
iMAP: Implicit Mapping and Positioning in Real-Time
Edgar Sucar, Shikun Liu, Joseph Ortiz, Andrew J. Davison ICCV, 2021 project page / paper
|
|
NodeSLAM: Neural object descriptors for multi-view shape reconstruction
Edgar Sucar, Kentaro Wada, Andrew Davison 3DV, 2020 project page / paper
|
|
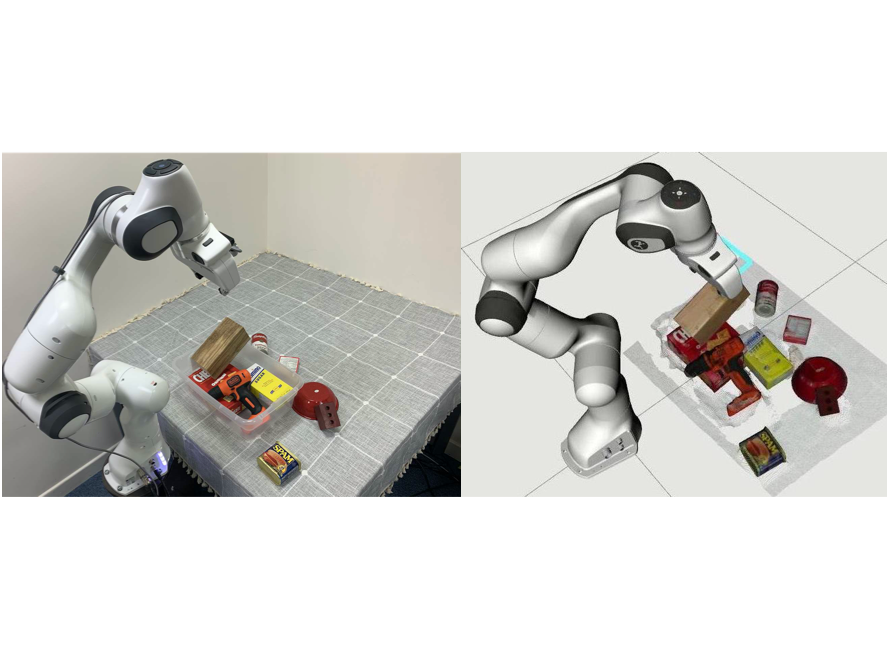
Morefusion: Multi-object reasoning for 6d pose estimation from volumetric fusion
Kentaro Wada, Edgar Sucar, Stephen James, Daniel Lenton, Andrew J. Davison CVPR, 2020 project page / paper
|
|
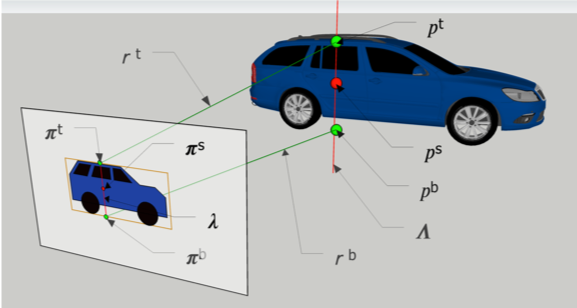
Bayesian scale estimation for monocular SLAM based on generic object detection for correcting scale drift
Edgar Sucar, Jean-Bernard Hayet ICRA, 2018 paper
|
|
Website template: source code. |